Chinese Journal of Computational Physics ›› 2022, Vol. 39 ›› Issue (1): 83-95.DOI: 10.19596/j.cnki.1001-246x.8339
• Research Reports • Previous Articles Next Articles
Lican ZHANG1( ), Mingmin GUO2, Zhiyang LIN3, Peng ZHANG4, Yali DUAN1,*()
), Mingmin GUO2, Zhiyang LIN3, Peng ZHANG4, Yali DUAN1,*()
Received:2021-02-02
Online:2022-01-25
Published:2022-09-03
Contact:
Yali DUAN
Lican ZHANG, Mingmin GUO, Zhiyang LIN, Peng ZHANG, Yali DUAN. A Lane Changing Model Based on High Order Conservation Model and Support Vector Machine[J]. Chinese Journal of Computational Physics, 2022, 39(1): 83-95.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.cjcp.org.cn/EN/10.19596/j.cnki.1001-246x.8339
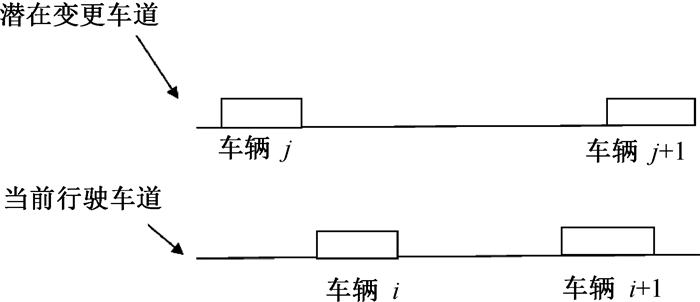
Fig.1 Car following diagram
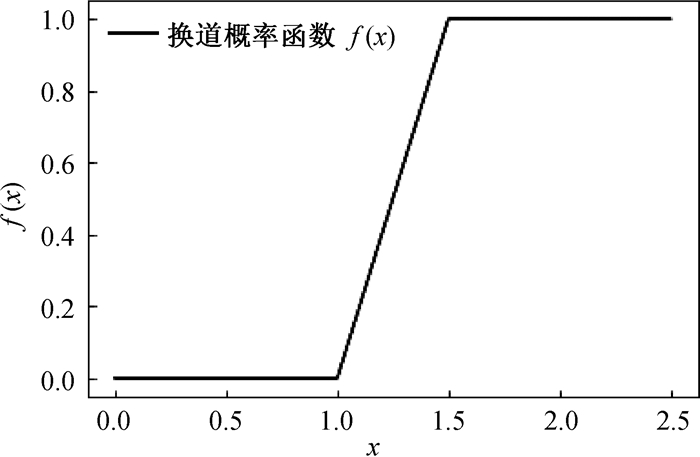
Fig.2 Probability function f(x)
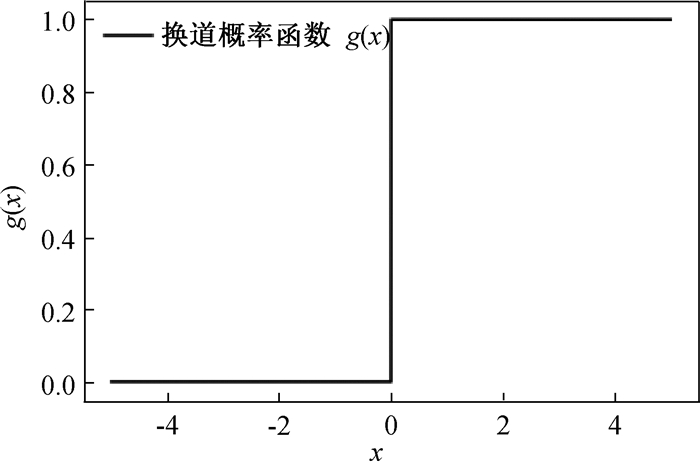
Fig.3 Probability function g(x)
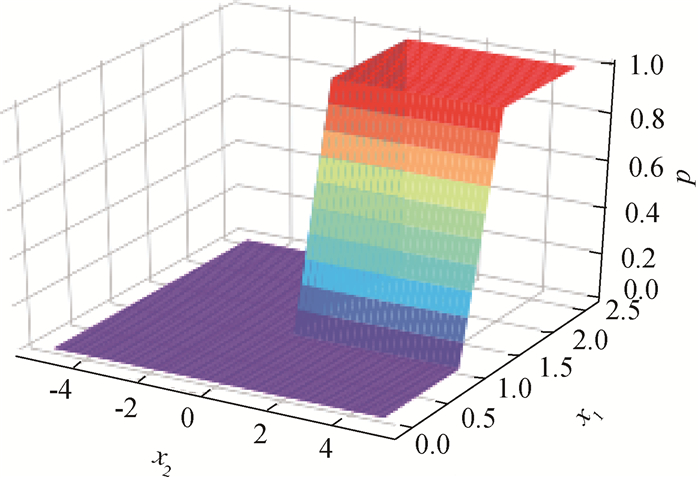
Fig.4 Probability function p
| 惩罚系数 | 训练时间/s | 分类准确率/% | 惩罚系数 | 训练时间/s | 分类准确率/% | 惩罚系数 | 训练时间/s | 分类准确率/% | ||
| 0.05 | 1 826 | 87 | 0.45 | 1 441 | 89 | 0.85 | 1 650 | 90 | ||
| 0.1 | 1 339 | 88 | 0.5 | 1 331 | 89 | 0.9 | 1 744 | 90 | ||
| 0.15 | 1 426 | 88 | 0.55 | 1 328 | 89 | 0.95 | 1 819 | 90 | ||
| 0.2 | 1 408 | 89 | 0.6 | 1 327 | 89 | 1.0 | 1 845 | 90 | ||
| 0.25 | 1 418 | 89 | 0.65 | 1 458 | 89 | 1.05 | 1 913 | 90 | ||
| 0.3 | 1 251 | 89 | 0.7 | 1 594 | 89 | 1.1 | 1 522 | 90 | ||
| 0.35 | 1 319 | 89 | 0.75 | 1 622 | 90 | 1.15 | 1 416 | 90 | ||
| 0.4 | 1 298 | 89 | 0.8 | 1 688 | 90 | 1.2 | 1 372 | 90 |
Table 1 Classification accuracy under different parameters
| 惩罚系数 | 训练时间/s | 分类准确率/% | 惩罚系数 | 训练时间/s | 分类准确率/% | 惩罚系数 | 训练时间/s | 分类准确率/% | ||
| 0.05 | 1 826 | 87 | 0.45 | 1 441 | 89 | 0.85 | 1 650 | 90 | ||
| 0.1 | 1 339 | 88 | 0.5 | 1 331 | 89 | 0.9 | 1 744 | 90 | ||
| 0.15 | 1 426 | 88 | 0.55 | 1 328 | 89 | 0.95 | 1 819 | 90 | ||
| 0.2 | 1 408 | 89 | 0.6 | 1 327 | 89 | 1.0 | 1 845 | 90 | ||
| 0.25 | 1 418 | 89 | 0.65 | 1 458 | 89 | 1.05 | 1 913 | 90 | ||
| 0.3 | 1 251 | 89 | 0.7 | 1 594 | 89 | 1.1 | 1 522 | 90 | ||
| 0.35 | 1 319 | 89 | 0.75 | 1 622 | 90 | 1.15 | 1 416 | 90 | ||
| 0.4 | 1 298 | 89 | 0.8 | 1 688 | 90 | 1.2 | 1 372 | 90 |
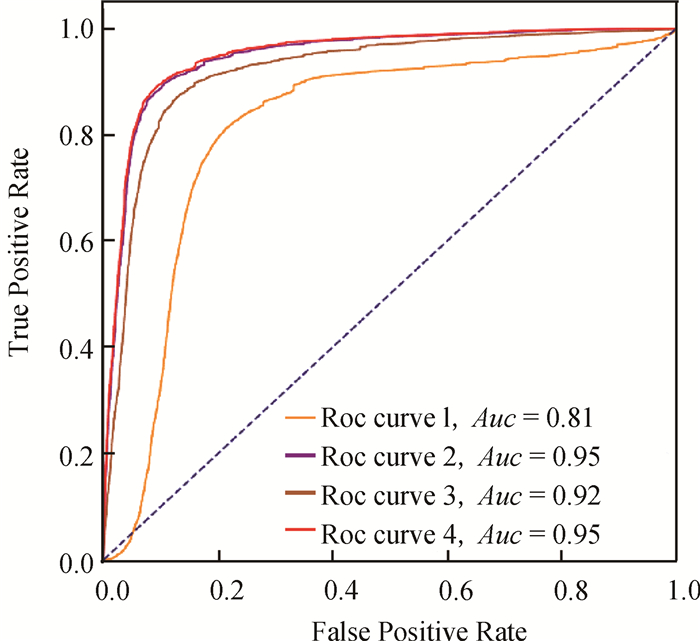
Fig.5 ROC curves under various parameters
| X1/次 | X2/次 | X3/次 | ${\bar X}$/次 | 换道率相对误差/% | ||
| 规则1 | 477 | 527 | 484 | 496 | 0.009 1 | 15.59 |
| 规则2 | 1 925 | 1 918 | 1 922 | 1 921 | 0.035 3 | 222.93 |
| 支持向量机 | 471 | 483 | 495 | 483 | 0.008 9 | 18.34 |
Table 2 Lane change rate analysis of low speed and high density scenes
| X1/次 | X2/次 | X3/次 | ${\bar X}$/次 | 换道率相对误差/% | ||
| 规则1 | 477 | 527 | 484 | 496 | 0.009 1 | 15.59 |
| 规则2 | 1 925 | 1 918 | 1 922 | 1 921 | 0.035 3 | 222.93 |
| 支持向量机 | 471 | 483 | 495 | 483 | 0.008 9 | 18.34 |
| X1/次 | X2/次 | X3/次 | ${\bar X}$/次 | 换道率相对误差/% | ||
| 规则1 | 89 | 79 | 66 | 78 | 0.005 1 | 76.99 |
| 规则2 | 385 | 391 | 408 | 395 | 0.025 9 | 14.60 |
| 支持向量机 | 395 | 399 | 412 | 402 | 0.026 4 | 16.81 |
Table 3 Lane change rate analysis of high speed and low density scenes
| X1/次 | X2/次 | X3/次 | ${\bar X}$/次 | 换道率相对误差/% | ||
| 规则1 | 89 | 79 | 66 | 78 | 0.005 1 | 76.99 |
| 规则2 | 385 | 391 | 408 | 395 | 0.025 9 | 14.60 |
| 支持向量机 | 395 | 399 | 412 | 402 | 0.026 4 | 16.81 |
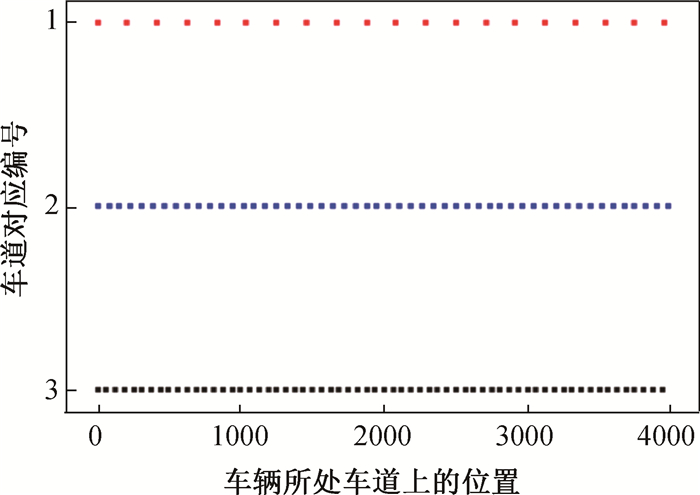
Fig.6 Multi lane vehicle location information at t=0 s
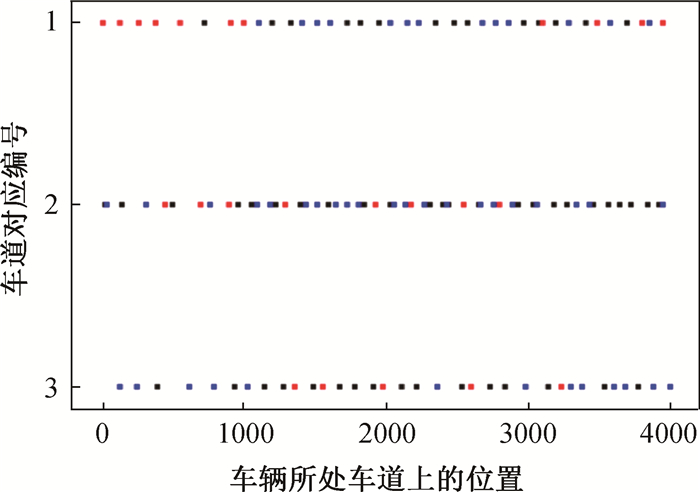
Fig.7 Multi lane vehicle location information at t=36 s
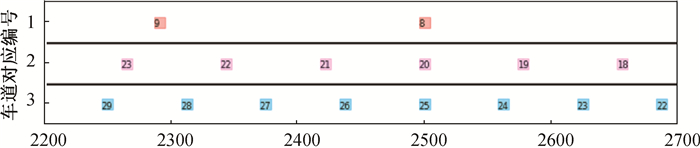
Fig.8 Vehicle distribution of each lane at t=0 s
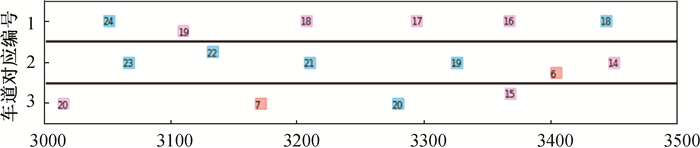
Fig.9 Vehicle distribution of each lane at t=18.25 s
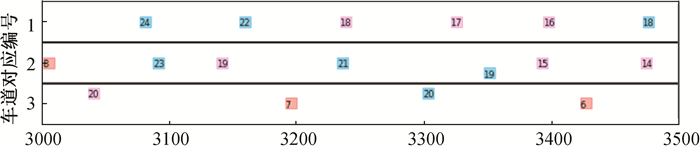
Fig.10 Vehicle distribution of each lane at t=19.25 s
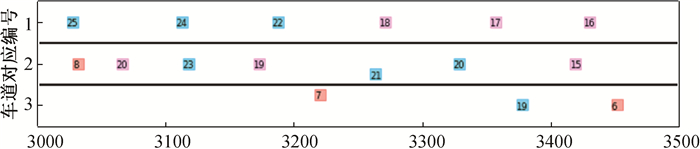
Fig.11 Vehicle distribution of each lane at t=20.25 s
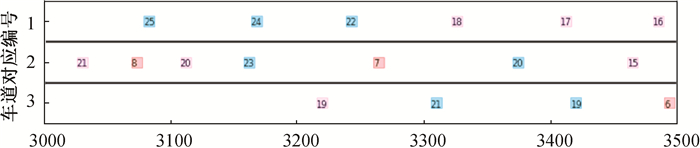
Fig.12 Vehicle distribution of each lane at t=22 s
| 时间/s | 一车道车辆数 | 二车道车辆数 | 三车道车辆数 |
| 0 | 20 | 51 | 64 |
| 40 | 34 | 43 | 44 |
| 80 | 31 | 37 | 38 |
| 120 | 29 | 29 | 32 |
| 160 | 27 | 23 | 25 |
| 200 | 27 | 23 | 23 |
| 240 | 24 | 29 | 20 |
Table 4 Distribution of vehicles in each lane
| 时间/s | 一车道车辆数 | 二车道车辆数 | 三车道车辆数 |
| 0 | 20 | 51 | 64 |
| 40 | 34 | 43 | 44 |
| 80 | 31 | 37 | 38 |
| 120 | 29 | 29 | 32 |
| 160 | 27 | 23 | 25 |
| 200 | 27 | 23 | 23 |
| 240 | 24 | 29 | 20 |
| 1 |
龙小强, 谭云龙. 微观仿真自主性车道变换模型[J]. 公路交通科技, 2012, 29 (11): 115- 119.
DOI |
| 2 |
刘运通, 石建军, 熊辉. 交通系统仿真技术[M]. 北京: 人民交通出版社, 2002: 6- 7.
|
| 3 |
AHMED K I. Modeling drivers'acceleration and lane changing behavior[D]. Massachusetts Institute of Technology, 1999.
|
| 4 |
DOI |
| 5 |
DOI |
| 6 |
徐英俊. 城市微观交通仿真车道变换模型研究[D]. 长春: 吉林大学, 2005.
|
| 7 |
DOI |
| 8 |
DOI |
| 9 |
DOI |
| 10 |
智永锋, 张骏, 史忠科. 高速公路加速车道长度设计与车辆汇入模型研究[J]. 中国公路学报, 2009, 22 (2): 93- 97.
DOI |
| 11 |
王荣本, 游峰, 崔高健. 车辆安全换道分析[J]. 吉林大学学报(工学版), 2005, 35 (2): 179- 182.
|
| 12 |
KASHANI A A, RAZIAN M R, FATHIAN M. The rise of big data on cloud IoT integration: A case study in Intelligent Transportation System (ITS)[C]. International Conference on New Research Achievements in Electrical and Computer Engineering (ICNRAECE), 2016.
|
| 13 |
苏刚, 王坚, 凌卫青. 基于大数据的智能交通分析系统的设计与实现[J]. 电脑知识与技术, 2015, 36: 44- 46.
|
| 14 |
|
| 15 |
|
| 16 |
傅贵, 韩国强, 逯峰. 基于支持向量机回归的短时交通流预测模型[J]. 华南理工大学学报(自然科学版), 2013, 41 (9): 71- 76.
DOI |
| 17 |
胡启洲, 高宁波, 叶茂. 基于支持向量机的道路交通事故数据统计模型研究[J]. 中国安全科学学报, 2013, 23 (6): 39- 44.
DOI |
| 18 |
邱小平, 刘亚龙. 基于支持向量机的车辆跟驰模型[J]. 重庆交通大学学报(自然科学版), 2015, 34 (6): 128- 132.
|
| 19 |
杨殿阁, 何长伟, 李满. 基于支持向量机的汽车转向与换道行为识别[J]. 清华大学学报(自然科学版), 2015, 55 (10): 1093- 1097.
|
| 20 |
吴伟, 沈益峰, 徐建军. 基于实时交通数据的路网展示系统的开发研究[J]. 交通标准化, 2009, (21): 122- 124.
|
| 21 |
谢嘉孟, 彭宏, 周兵. 基于数据挖掘技术的智能交通信息分析与决策研究[J]. 公路, 2004, (4): 154- 158.
DOI |
| 22 |
DOI |
| 23 |
DOI |
| 24 |
DOI |
| 25 |
|
| 26 |
DOI |
| 27 |
LIN Z Y, ZHANG P, DONG L Y. Physically bounded solution for a conserved higher-order traffic flow model[M]. Springer, 2015: 463-470.
|
| 28 |
|
| 29 |
DOI |
| 30 |
DOI |
| 31 |
吴春秀. 基于Lagrange坐标的交通流模型的稳态解与瓶颈效应[D]. 上海: 上海大学, 2012.
|
| 32 |
王永明, 周磊山, 吕永波. 基于元胞自动机交通流模型的车辆换道规则[J]. 中国公路学报, 2008, 21 (1): 89- 93.
DOI |
| 33 |
王江卓, 徐文聪, 李建勋. 基于支持向量机的雷达电子支援措施系统点迹-航迹关联算法[J]. 上海交通大学学报, 2019, 53 (9): 1091- 1099.
|
| 34 |
张莉, 卢星凝, 陆从林. 支持向量机在高考成绩预测分析中的应用[J]. 中国科学技术大学学报, 2017, 47 (1): 1- 9.
|
| 35 |
DOI |
| 36 |
杨思琪. 高速公路交通拥堵状况预测模型的研究与应用[D]. 广州: 华南理工大学, 2017.
|
| 37 |
石京, 柳美玉. 基于驾驶模拟实验的驾驶风格对高速公路换道行为的影响[J]. 东南大学学报: 自然科学版, 2017, (5): 1037- 1041.
|
| 38 |
许伦辉, 倪艳明, 罗强. 基于最小安全距离的车辆换道模型研究[J]. 广西师范大学学报: 自然科学版, 2011, 29 (4): 1- 6.
|
| 39 |
楼晓俊, 孙雨轩, 刘海涛. 聚类边界过采样不平衡数据分类方法[J]. 浙江大学学报(工学版), 2013, (6): 944- 950.
DOI |
| [1] | LI Haoyu, LIN Zhiyang, ZHANG Peng, DUAN Yali. Modeling and Simulation of Dynamic Traffic Assignment Based on Conserved Higher-order Model [J]. CHINESE JOURNAL OF COMPUTATIONAL PHYSICS, 2020, 37(6): 687-699. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Copyright © Chinese Journal of Computational Physics
E-mail: jswl@iapcm.ac.cn
Supported by Beijing Magtech Co., Ltd.